设计文档
P (Processors)的设计:
struct P
{
Lock;
G *gfree; // freelist, moved from sched
G *ghead; // runnable, moved from sched
G *gtail;
MCache *mcache; // moved from M
FixAlloc *stackalloc; // moved from M
uint64 ncgocall;
GCStats gcstats;
// etc
...
};
P *allp; // [GOMAXPROCS]
P *idlep; // lock-free list
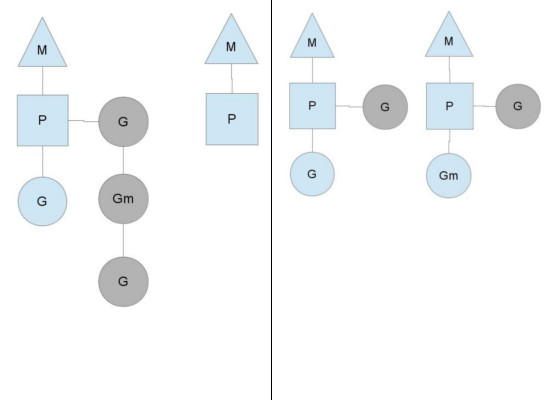
P可以抽象为手推车。每个M(gopher)都需要一个P(手推车)来执行G(搬砖)。When an M is willing to start executing Go code, it must pop a P form the list. When an M ends executing Go code, it pushes the P to the list.
调度
新建的G,或者刚变为可执行的G,都进入P的可执行ghead队列。(要搬的砖放入到手推车里面)。当一个P里的G执行完后,M会去另一个P的队列里偷一半的G过来。(从别人的手推车里面偷一半的砖过来)。
全局G队列
当M几次试图偷别的P的G都失败后,会检查全局G队列是否有空闲的G。(gopher没有偷到砖,去厂区的公共场地看看有没有砖)。
更详细的解释
为啥需要golang的调度器?
1、因为操作系统的内核态线程太笨重,消耗很多资源是golang不需要用到的,这样的话当很多goroutine并发时系统资源消耗巨大。2、因为golang自身模型结构需要,比如gc stw的时候,就需要所有线程停止并且内存达到一致性,这个要求在操作系统的内核态线程调度上很难满足。
golang的用户态线程模型
三种常见模型:
1、N:1,n个用户态线程对应一个内核态线程,缺点是无法利用多核优势。
2、1:1,一对一的模型可以用到多核,但是在每个核上上下文切换时由于会陷入内核(TRAP)而带来性能损耗。
3、M:N,兼顾上面两种情况,golang调度器采用。
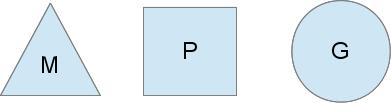
调度器抽象了三种实体:M(machine)代表内核态线程;G(goroutine)代表用户态线程,包含了goroutine需要的各种栈、指令指针等重要信息。P(processer)代表调度中的上下文切换。P的个数是由GOMAXPROCS环境变量或者GOMAXPROCS()函数指定的,在程序中一般不会改变,不然代价很大,会stw。
如上是三种实体执行程序的模型。每个M需要搭配一个P来执行一个G,且P挂有一队待执行的G队列(runqueue)。用go语句新生成的G会加入到runqueue中,当调度点到来时,P会pop一个runqueue中的G,设置好栈、指令指针等,开始执行。
最初的设计是只有一个全局的runqueue,但是发现P会经常阻塞在等待runqueue的互斥过程中,所以现在每个P都有自己的runqueue。
只要P的runqueue中G不为空,这样的调度会持续下去。但是有几种情况会打破这种平衡态。
syscall
如最早那篇文章在讨论的,为啥要引入P的概念,直接用M不久行了吗?还真不行,P的存在意义是当M阻塞的时候,可以把P关联到其他M上去。
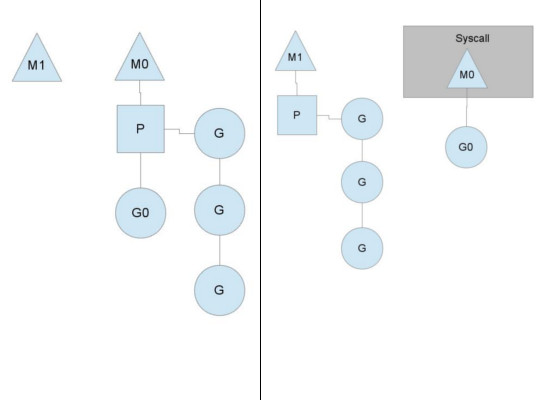
比如,当M0阻塞在syscall的时候,其关联的P和P的runqueue会被转移给M1,M0会继续持有G0。M1可以是专为此次转移而创建的,也可能是来自线程缓冲池。当syscall返回后,M0需要关联一个P来完成G0的执行,通常的办法是去别的M处偷一个P,如果不行的话,就把G0放到全局runqueue中,然后M0自己去线程缓冲池休眠。
每当有P执行完自己的runqueue后,都会到全局runqueue来获取G。P也会周期性地检查全局runqueue的情况,不然全局runqueue可能会一直得不到执行。
上述对syscall的描述也说明了为啥golang的程序执行需要多线程,尽管GOMAXPROCS可能为1。
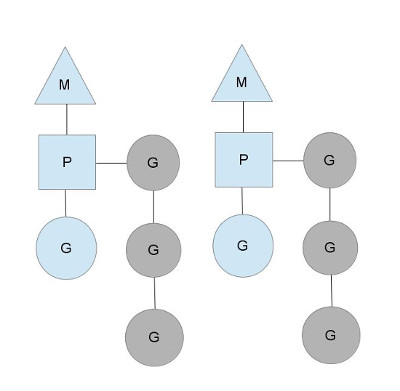
偷取工作
另一种情况是当M执行完自己的P的runqueue,也会打破上述的调度平衡态。当P的runqueue的量相比而言不平均时就会发生这种情况,导致一个P耗尽了自己的runqueue,但是系统还有很多工作要做。这种情况发生时,M会先去全局runqueue处取G,如果没有的话,就需要去偷别的M的G了,如下图所示。